
发布日期:
中国科大研制出机器人灵巧手指尖六维力传感器
文章字数:878
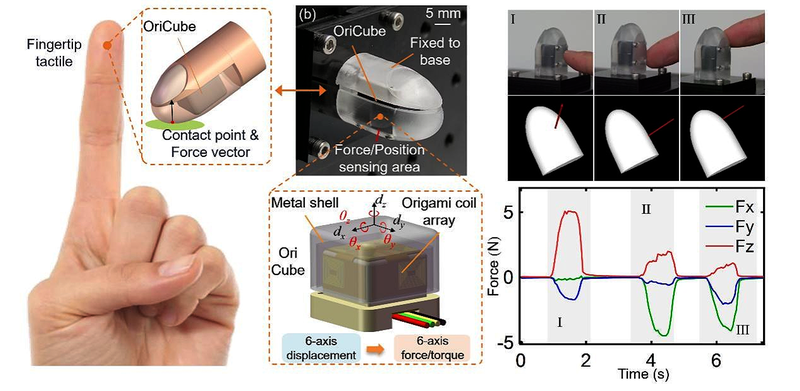 图1基于指尖六维力传感器的内生触觉感知。
图1基于指尖六维力传感器的内生触觉感知。 本报讯(全媒体记者 韩如意)近日,中国科学技术大学工程科学学院、人形机器人研究院传来捷报,王洪波研究员课题组成功研制出一款名为“OriCube”的指尖大小六维力/力矩(F/T)传感器。该成果为机器人实现“像人一样用手指触摸与操作”提供了关键的感知能力。
触觉被认为是实现灵巧操作与安全人机交互的核心。然而,现有指尖触觉方案常面临布线复杂、数据处理负担重以及曲面适配性差等难题。王洪波课题组另辟蹊径,提出以嵌入式六轴力/力矩传感器为核心,结合几何模型实现“内生触觉感知”(ITS)的创新方案。该方案能以更简洁的系统结构,实时获取接触信息。
“OriCube”传感器体积仅为14×14×12立方毫米,重量仅有4克,体积与重量均与成人指尖相仿。尽管身形小巧,其性能却十分强大:在23牛顿(N)的量程下,它能实现3毫牛(mN)级的分辨率,这意味着它可以感知到一根羽毛轻轻扫过的微小力度。
在技术设计上,OriCube展现了极高的集成度与创新性。它采用基于柔性电路板(FPC)一体制造的折纸式三维线圈阵列,利用电涡流耦合效应,精确测量金属外壳在六个自由度(平移与转动)上的微小位移。同时,通过模块化的12个硅胶“微弹簧”弹性体,将外部施加的力/力矩转换为壳体的位移,并允许独立调节各轴向的刚度,从而在微小尺寸内实现了灵敏度与量程的最佳平衡。
严格的测试结果显示,OriCube在指尖尺寸的约束下实现了高性能测量:不仅体积小、重量轻、功耗低至45毫瓦,还具备极低的轴间串扰(约2.24%)和高测量精度(最大误差小于2%)。在长达6小时的连续运行中,其漂移量小于0.2%,展现出极佳的稳定性。此外,该传感器既能感知微弱接触,又能承受锤击等强冲击,并对外界磁场干扰具备良好的抑制能力,确保了在复杂工况下的可靠运行。
研究团队进一步将OriCube嵌入3D打印的仿生指尖,结合内生触觉感知(ITS)方法,在指尖曲面上成功实现了接触点位置与接触力矢量的实时同步估计。实验数据表明,该触觉感知结果与外部高精度参考力传感器的数据高度吻合。
该工作为机器人灵巧手的触觉感知提供了一种低成本、高鲁棒性、易于集成的新方案,有望极大提升机器人在不确定环境下执行复杂操作任务的能力。